Estado del Arte de las Comunicaciones Acústicas Submarinas.
State of the Art of Underwater Acoustic Communications.
Andre Sebastian Samaniego Buñay(1)
(1) Escuela Superior Politécnica de Chimborazo. Riobamba, Ecuador. andre.samaniego@espoch.edu.ec
ORCID: https://orcid.org/0009-0001-3244-1121
Contacto: andre.samaniego@espoch.edu.ec
Artículo recibido el 28/mayo/2023. Aprobado: 14/junio/2023
Resumen
Las comunicaciones subacuáticas son un gran reto para la comunidad científica al tener una gran complejidad en su diseño y comunicación, no obstante son de gran importancia al estar la Tierra cubierto en su mayoría por masas de agua de mar, el objetivo planteado es recopilar la información de fuentes confiables acerca del tema para sintetizar y facilitar el entendimiento de las comunicaciones submarinas acústicas destinadas a personas con gran interés en este tema a través de una revisión sistemática tomando en consideración dos aspectos importantes de las comunicaciones acústicas submarinas como son el canal de comunicación el cual conlleva los factores que afectan la comunicación tales como las atenuaciones, ruido y efecto Doppler, gracias al conocimiento de estos factores se concluyó que se puede disminuir el impacto que estas presentan. El segundo aspecto considerado son las modulaciones empleadas pues gracias a estas la información puede ser modulada y demodulada dependiendo del tipo que se use con el fin de obtener la información transmitida de la mejor manera en el receptor pues estos parámetros son los más básicos implementados en un sistema de comunicación acústica submarina.
Palabras clave: Canal de comunicación acústico; Modulación; Ruido; Atenuación; Ondas acústicas.
Abstract
Underwater communications are a great challenge for the scientific community as they have great complexity in their design and communication, however they are of great importance as the Earth is mostly covered by masses of seawater, the objective is to collect information from reliable sources on the subject to synthesize and facilitate the understanding of underwater acoustic communications for people with great interest in this subject through a systematic review taking into account two important aspects of underwater acoustic communications such as the communication channel which entails the factors that affect communication such as attenuations, noise and Doppler effect, thanks to the knowledge of these factors it was concluded that the impact they present can be reduced. The second aspect considered are the modulations used because thanks to these the information can be modulated and demodulated depending on the type used in order to obtain the information transmitted in the best way in the receiver since these parameters are the most basic implemented in a underwater acoustic communication system.
key words: Acoustic communication channel; Modulation; Noise; Attenuation; Acoustic waves.
Introducción
La superficie de la Tierra está distribuida: 70% masa de agua mientras que el 30% restante corresponde a la masa continental (Toledo, 2006), tomando un gran papel el primer medio dado que mediante este se efectúan diferentes actividades diarias como la investigación en el medio submarino pues se realizan “recolección de datos oceanográficos, registro de datos climáticos, prevención de desastres, estudio de la vida marina, la monitorización de contaminación ambiental,
exploración de recursos naturales submarinos, ayuda a la navegación, misiones de búsqueda, comunicaciones entre vehículos submarinos y otros” (López Tacorante, 2017), despertando un gran interés en el mundo de la ciencia al necesitar una buena comunicación y recopilación bajo el agua el ser humano trata de reducir cualquier limitación para beneficiarse y facilitar su trabajo. Por lo que el objetivo de este documento es recopilar la información de fuentes confiables acerca del tema para sintetizar y facilitar el entendimiento de las comunicaciones submarinas acústicas destinadas a personas con gran interés en este tema a través de una revisión sistemática. En el ámbito de las comunicaciones submarinas se han estudiado diferente tipo de señales como: ondas electromagnéticas las cuales en comunicaciones son las más utilizadas no obstante debido a las grandes atenuaciones del campo eléctrico y magnético su alcance es limitado al igual que su efectividad (Labrador, Karimi, & Miller, 2009), también están las ondas ópticas las mismas que tienen elevados costos en su implementación pues se necesita de fibra óptica la misma que carece de flexibilidad lo cual es otra desventaja que se tiene (Divya & Panicker, 2016), la atenuación de este tipo de ondas depende de la absorción del agua y la turbidez (López Tacorante, 2017), es por todo esto que se ha visto la necesidad de trabajar a bajas frecuencias teniendo, así como mejor opción a las ondas mecánicas donde se encuentran las acústicas que son las más adecuadas para conexiones inalámbricas en el medio submarino (Labrador, Karimi, & Miller, 2009).
Este medio es muy agresivo por lo que en las últimas dos décadas el interés ha crecido exponencialmente llegando así a estudiar algunos parámetros clave como la eficiencia, latencia del ancho de banda, confiabilidad y tomando un aspecto muy importante como es las condiciones de propagación cambiantes (Sonj, Milica, & Mandar, 2019), pues al tener lugar esta comunicación en el fondo del mar existe una gran reflexión a causa del cambio de impedancia, esto hace que lleguen ecos con distintos retardos y atenuaciones al receptor lo que provoca una mala calidad de la comunicación (López Tacorante, 2017). Dentro de la comunicación acústica submarina un punto clave es el canal de comunicación acústico donde se encuentran presentes algunos factores que se han evidenciado debido al estudio arduo, entre los más importantes tenemos: la capacidad del canal de comunicación acústico que establece la velocidad de datos a la que se puede transmitir (Hayward & T., 2004), pérdida en la transmisión, propagación de trayectos múltiples, ruido ambiental el cual contamina a la señal de información y el Efecto Doppler que es variable (Divya & Panicker, 2016), debemos considerar que el ancho de banda de la comunicación acústica es muy pequeño pues este ancho de banda es no despreciable con respecto a la frecuencia central (Stojanovic M. , 2008).
Como atestigua la historia de la comunicación acústica submarina su implementación ha resultado beneficiosa un claro ejemplo es en la detección de misiles submarinos a través del sonido pues al no tener vista bajo el agua se necesita de un mecanismo de detección el cual es el sonido (Ejercitos, 2022) para esto se necesita un buen procesamiento de señales mediante el modelado de canal adecuado (Stojanovic M. , 2008), otros ejemplos son el modelado combinado de multitrayecto y distorsión de fase para la ecualización en sistemas de banda ancha de una sola portadora (Stojanovic, Catipovic, & J., 1993), claramente se evidencia que existe una gran utilización de este tipo de comunicación en dicho medio por lo cual en las comunicaciones acústicas submarinas hay técnicas que permiten aumentar la eficiencia espectral dentro de estas se encuentran diferentes tipos de modulaciones como las digitales (Bouvet, 2020). El documento está organizado en dos secciones (1) Canal Acústico de Comunicación Submarina y (2) Modulaciones usadas para transmisiones acústicas submarinas.
Desarrollo
La comunicación acústica submarina es una técnica para enviar y recibir mensajes bajo el agua este tipo de comunicación se puede clasificar según la profundidad del agua como aguas profundas y aguas poco profundas donde se habla de aguas poco profundas cuando los rayos acústicos emitidos interactúan de manera significativa con los límites que son el fondo y la superficie (Socheleau, 2011), existen diferentes formas de esta comunicación pero la más usada es mediante hidrófonos (Akyildiz, Pompili, & Melodia, 2005). El resultado de tantas investigaciones durante estas décadas da como resultado una mejora en el rendimiento y robustez de los sistemas de comunicación si comparamos con los que se desarrollaron inicialmente (Córdoba González, 2020).
Según (López Tacorante, 2017) “la velocidad de propagación de las ondas acústicas en el agua es de aproximadamente 1.500 m/s, es decir, unas 200.000 veces menor que la onda electromagnética en el aire”; está onda se prefiere como portadora gracias a que permite enlaces más largos.
Canal Acústico de Comunicación Submarino.
Si se menciona el canal acústico submarino este se encarga de estudiar la propagación de las ondas acústicas dado que estas se propagan mediante compresión y descompresión adiabática, los principales factores que describen una onda acústica hacen referencia al desplazamiento de partículas, presión del sonido y la intensidad del antes mencionado (Divya & Panicker, 2016). Hay que tomar en cuenta que el canal se caracteriza porque la atenuación crece en proporción con la frecuencia de la señal, además el sonido se propaga en estos medios a una velocidad aproximada de 1500 m/s y esta se da por múltiples trayectos, también el movimiento del transmisor y receptor provoca un desplazamiento de frecuencias y una dispersión debido al efecto Doppler (Córdoba González, 2020). En el canal acústico submarino se juntan las peores propiedades de un canal de radio las cuales son: mala calidad del enlace y alta latencia (Chitre & Shahabudeen, 2008), estas propiedades influyen directamente en el diseño, desarrollo y funcionamiento de los sistemas de comunicación subacuáticos lo cual también es tomado en consideración por (Lapierre & Lurton, 2007) en su estudio de las comunicaciones acústicas submarinas.
En consideración con lo descrito por (Labrador, Karimi, & Miller, 2009) en su estudio de comunicaciones acústicas comparando dichas ondas con respecto a las ondas magnéticas y (Divya & Panicker, 2016) haciendo una comparación con ondas ópticas todos estos investigadores informan que las ondas acústicas son las mejores donde hay un acuerdo por parte de todos pues al trabajar a bajas frecuencias los alcances y resistencia a las atenuaciones son más eficientes, no obstante al estudiar las diferentes características del canal se presentan los siguientes factores:
Capacidad del Canal Acústico de Comunicación Submarino: Se puede realizar una estimación de la capacidad del canal a través de una suposición donde el transmisor y receptor conocen exactamente la función de transferencia del canal para cada transmisión y esta no varía en el tiempo obteniendo condiciones ideales para este canal, se consideran las siguientes ecuaciones descritas por (Hayward & T., 2004):
$$\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ I = \int_{0}^{\infty}{\log_{2}(1 + \frac{H(f)X(f)}{N(f)})}df\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (1)$$
La Ecuación (1) hace referencia a la capacidad del canal mediante el máximo de la integral donde H(f) es la función de transferencia para una fuente gaussiana con densidad espectral de potencia X(f) y N(f) es la densidad espectral de potencia del ruido gaussiano aditivo, esta ecuación se encuentra sujeta a la restricción de potencia de la fuente
∫−∞∞X(f)df = P (2)
Donde P es la potencia media. El máximo se calcula con la aplicación del método de los multiplicadores de Lagrange y se logra cuando el espectro de la fuente satisface a la Ecuación (3)
$$\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ X(f) = max\left\{ L - \frac{N(f)}{H(f)},\ 0 \right\}\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (3)$$
Donde L se elige de modo que satisfaga la Ecuación (2). En la práctica el ancho de banda se limita a una fracción de la frecuencia de la portadora, y la frecuencia de la portadora a menudo se
configura para que sea inversamente proporcional a la raíz cuadrada del receptor. La capacidad del canal sujeta a estas restricciones puede encontrarse restringiendo las frecuencias en las Ecuaciones (1) y (3) a las bandas de frecuencia especificadas (Hayward & T., 2004).Atenuación: Se produce debido a la pérdida de energía al recorrer distancias y esto depende de la frecuencia, es una consecuencia de la absorción del canal que se conoce como la transformación de energía acústica en calor. (Córdoba González, 2020) Indica que las pérdidas totales se pueden calcular con la ecuación:
$$\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ A(l,f) = \left( \frac{l}{l_{r}} \right)^{k}\alpha{(f)}^{l - l_{r}}\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (4)$$
Donde l es la distancia de transmisión con respecto a lr que es la distancia de referencia y f la frecuencia de la señal. Por último, K indica la pérdida en el camino producido por la divergencia.
En este debe considerarse a la velocidad de propagación de la perturbación que se encuentra impuesta por las propiedades típicas de las moléculas en el agua (Ruiz, 2013), se la puede medir con instrumentos o estimar mediante la ecuación:
c = 1449, 2 + 4, 6T − 0, 055T2 + 0, 00029T3 + (1,34−0,01T)(S−35) + 0, 016z (5)
Donde T es la temperatura expresada en ℃, S es la salinidad, z la profundidad en metros y c la velocidad de propagación.
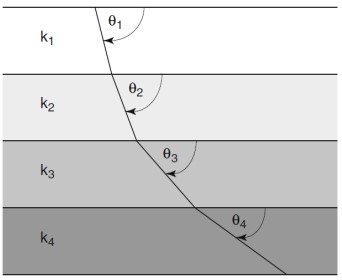
Se hace referencia a un modelo estratificado en número finito de capas donde la velocidad es constante para cada capa pues al penetrar la onda esta lo hace de forma curva donde el ángulo es variable como se indica en la Figura 1. (Corregidor, 2020)
Figura 1. Rayo refractado a través de varias capas contiguas. (Corregidor, 2020)
Para hallar el ángulo se usa la ley de Snell.
k1cos θ1 = k2cos θ2 (6)
Donde se ignora la parte de la onda reflejada, pues está demostrado que tiende a tener muy baja energía (Jensen, Kuperman, Porter, & Schmidit, 2011).
Multitrayecto: Se produce debido a las reflexiones del sonido con la superficie del mar u objetos que se encuentren en el entorno y debido a la refracción de las ondas acústicas en el agua (Córdoba González, 2020). Donde un punto clave es la incidencia de la onda en el agua como se ha mencionado en la Ley de Snell descrita por la Ecuación (6).
Efecto Doppler: Se produce cuando existe un movimiento relativo entre la fuente y receptor, este hace que se produzca un desplazamiento frecuencial de la onda transmitida (López, 2016).
fnϵ = fn(1±ϵ) (7)
En la Ecuación (7) se suma cuando la fuente se acerca mientras que se resta cuando la fuente se aleja, es usada para señales de banda estrecha que satisface a fc/B>>1 donde fc es la frecuencia de la portadora y B la banda de la señal. Para señales de banda ancha el desplazamiento Doppler no es uniforme en la banda, generalmente se representa como compresión/dilatación (Sharif, Neasham, Hinton, & Adams, 2000)
Ruido Submarino: Se toma en cuenta el ruido específico del escenario y el del ambiente de estudio donde siempre se presentará el último mencionado.
“El ruido del ambiente ocasionado por el movimiento del agua incluso en condiciones de mar en calma, que puede ser modelado por un espectro continuo y ruido Gaussiano coloreado” (Urick, 1986). Donde (López, 2016) nos indica que podemos calcular el ruido ambiental mediante la Ecuación (8).
N(f) = Nt(f)+ Ns(f) + Nw(f) + Nth(f) (8)
Donde Nt es el ruido debido a turbulencias, Ns debido a barcos, Nw debido a la velocidad del viento y Nth debido al ruido térmico.
Existe una relación señal a ruido la cual permite conocer la capacidad que tiene de recuperarse frente al ruido un sistema donde se describe este valor por la Ecuación (9) (López Tacorante, 2017).
SNR(db) = SL − TL − NL = SL − 10log (A(f)) − 10log (N(f)) * BW (9)
Donde N(f) es la densidad espectral del ruido, SL es la señal transmitida y BW el ancho de banda de la señal.
Modulaciones usadas para transmisiones acústicas submarinas.
La modulación de una señal se define como la alteración de una de una onda (portadora), en función de otra señal (moduladora), puede modificarse la amplitud, la fase o la frecuencia de la onda portadora. Haciendo uso esta técnica el espectro frecuencial de la moduladora se alinea a las características del canal de comunicación (López Tacorante, 2017). Las modulaciones de alto rendimiento se ven limitadas por las características del canal antes mencionadas, los sistemas más antiguos de transmisión submarino como el teléfono analógico se basaba en modulaciones de amplitud siendo deficiente debido al poco ancho de banda disponible (Lapierre & Lurton, 2007).
Se tiene dos tipos de modulaciones establecidas que son las coherentes y no coherentes.
Modulaciones coherentes: Han sido implementadas para mejorar la eficiencia espectral y el alcance, dentro de estas se evidencia a la modulación de amplitud en cuadratura la cual es una modulación híbrida debido a que varía la amplitud y fase de la portadora. También se considera la modulación en fase la cual es una modulación digital donde se varia la fase de la portadora.
Modulaciones no coherentes: Fueron las primeras utilizadas y eran demoduladas en base a la detección de energía, son factibles y nada complejos de implementar, pero tienen mucha desventaja en su eficiencia debido a las interferencias en el canal acústico submarino.
Dentro de este tipo de clasificación de modulaciones se encuentran las modulaciones en amplitud que cambian la amplitud de la portadora de acuerdo con la moduladora y las modulaciones en frecuencia donde la señal modulada mantiene su amplitud, lo que varía es la frecuencia de la portadora y lo hace de acuerdo con como varia la amplitud de la moduladora (López Tacorante, 2017).
Modulaciones más usadas en comunicaciones acústicas submarinas: Las modulaciones que hoy en día son más utilizadas en soluciones comerciales y en la comunidad científica son las digitales PSK.
La modulación de fase o Phase Shift Keying según (Córdoba González, 2020) “varía la fase de la portadora de tal manera que está pueda tomar un número discreto de diferentes valores, dicho valor depende del tipo de modulación M-PSK donde M indica los distintos estados que puede tomar la fase”. Se puede obtener el número de bits que representa cada símbolo (M) a través de:
n = log2M (10)
Se le asigna una fase Φi a cada símbolo M que lleva n bits.
$$\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \Phi_{i} = \frac{2\pi(i - 1)}{M} + \Phi_{0}\ ;\ \ \ \ \ \ \ \ \ \ \ i = 1,2,3,\ldots,M\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (11)$$
Donde Φ0 es la fase inicial. Obteniendo, así como se forman los símbolos tal cual describe la Ecuación (12).
$$\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ S_{i}(t) = Acos\left( 2\pi f_{c} + \frac{2\pi(i - 1)}{M} + \Phi_{0} \right)\ ;\ \ \ \ \ \ \ \ \ \ \ 0 \leq t \geq T\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (12)$$
Siendo T el período del símbolo, fc la frecuencia de la portadora, A la amplitud.
La constelación es la representación en el plano complejo de los símbolos en una modulación, como se indica en la Figura 2. Los ejes de los planos son I (fase) y Q(cuadratura) que se evidencian en parte real e imaginaria. (Córdoba González, 2020)
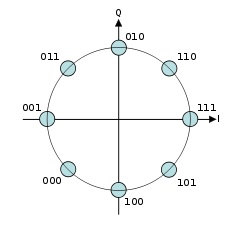
Figura 2. Constelación de 8PSK con codificación Gray. (Córdoba González,
2020)
Tomando en cuenta la Figura 2 podemos calcular la fase y cuadratura:
$$\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ I_{i} = cos\left( \frac{2\pi(i - 1)}{M} + \Phi_{0} \right)\ ;\ \ \ \ \ \ \ \ \ \ \ 0 \leq t \geq T\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (13)$$
$$\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ Q_{i} = sin\left( \frac{2\pi(i - 1)}{M} + \Phi_{0} \right)\ ;\ \ \ \ \ \ \ \ \ \ \ 0 \leq t \geq T\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (14)$$
(López, 2016) y (Corregidor, 2020) describen que una de las mejores modulaciones empleadas en los sistemas de comunicación acústico submarino es la descrita por fase PSK que al ser estudiada se observa que consta de una señal analógica con información digital que es afectada por una portadora que frecuentemente suele ser un seno o coseno de alta frecuencia pues en concordancia con esto al hablar de modulación se conoce que llevamos a una señal de información a altas frecuencias, esta modulación da una robustez muy buena.
Conclusiones.
El inicio de las comunicaciones acústicas submarinas tuvo varias deficiencias y mala calidad en la comunicación no obstante con el estudio del mismo se pueden hacer grandes mejoras y tomar más acogida por las personas que usan este medio para sus labores cotidianas, dichas mejoras se han logrado tomando en cuenta los dos puntos importantes investigados como son el canal de comunicación acústico submarino donde se producen las peores condiciones dadas por factores como la capacidad del canal, atenuaciones, efecto Doppler, multitrayecto y ruido submarino pues al saber qué es lo que afecta se puede disminuir el impacto que estas producen; así mismo, el segundo punto tomado en cuenta ayuda en la transmisión y recepción de la información pues las modulaciones alinean una señal a las características del canal estudiado siendo conceptos básicos que se manejan en los sistemas de comunicación bajo el agua.
Se pudo comprobar porque es tan complicado tener una comunicación tan eficiente en el medio submarino pues se presentan varios factores que perjudican la comunicación como las atenuaciones, efecto Doppler, multitrayecto y otros que cada uno influye en nuestra señal de información al ser transmitida por el canal.
El estudio arduo de las comunicaciones acústicas submarinas crece conforme al interés que proporciona está pues es la mejor para comunicaciones bajo el agua a largas distancias.
Las modulaciones en las comunicaciones son de gran importancia puesto que permiten la transmisión y recepción de la información tratando de la mejor forma que no se vea afectada por las otras señales que existe en el medio, en el caso submarino se detectó que hay dos tipos de ruido que son el ambiental y el del medio.
Bibliografía
Akyildiz, I., Pompili, D., & Melodia, T. (2005). Redes de sensores acústicos subacuáticos: desafíos de investigación. Ad Hoc Networks (Elsevier), vol. 3, 257-279.
Bouvet, P.-J. (2020). Communications acoustiques pour les réseaux sous-marins sans fils. Obtenido de Réseaux et télécommunications: https://theses.hal.science/tel-03018851v2
Chitre, M., & Shahabudeen, S. S. (2008). Underwater acoustic communications and networking: Recent advances and futures challenges. Obtenido de Marine Thechnology Society Journal: https://doi.org/10.4031/02533208786861263
Clemente Medina, M. d. (2013). Modulación adaptiva y diversidad en canales de comunicaciones acústicas subacúaticas. Obtenido de Repositorio de la Universidad de Málaga: https://riuma.uma.es/xmlui/handle/10630/5802
Córdoba González, P. (29 de Ocubre de 2020). Estudio y Simulación de la Ecualización de Comunicaciones Acústicas Submarinas. Obtenido de Tesis (Master), Sistemas de Telecomunicación (UPM): https://oa.upm.es/view/institution/ETSIS=5FTelecomunicacion
Corregidor, D. (2020). Estudio de modilaciones deigitales aplicado al campo de la acústica submarina. Obtenido de Repositorio Universidad Politécnica de Madrid: https://oa.upm.es/67231/
Divya, R., & Panicker, M. (2016). Acoustic Underwater Communication: Literature. International Journal for Innovative Research in Science & Technology, 176-179.
Ejercitos. (21 de Noviembre de 2022). Nuevos horizontes en la Detección Acústica Submarina. Obtenido de Revista Digital sobre Defensa, Armamento y Fuerzas Armadas: https://www.revistaejercitos.com/2022/11/21/nuevos-horizontes-en-la-deteccion-acustica-submarina/
Falkenmark, M. (2000). Competing Freshwater and Ecologic Services in the River Basin Perspective. An Expanded Conceptual Framework, 25(2): 172-177.
Hayward, T., & T., Y. (2004). Underwater Acoustic Communication Channel Capacity: A Simulation study. AIP Conference Proceedings, 114-121.
Jensen, F., Kuperman, W., Porter, M., & Schmidit, H. (2011). Computational Ocean Acoustic.
Labrador, Y., Karimi, M., & Miller, J. (2009). Modulation and Error Correction in the Underwater Acoustic Communication Channel. International Journal of Computer Science and Network Security, 123-130.
Lapierre, G., & Lurton, X. (2007). Les communications acoustiques sous-marines. Acoustique & Techniques n°48, 38-42.
Larraín, S. y. (2010). Conflictos por el agua en chile. Santiago: Chile Sustentable.
López Tacorante, A. I. (Julio de 2017). Propagación de ondas acústicas en espacios subacúaticos. Obtenido de Repositorio Institucional Universidad de la Laguna: https://riull.ull.es/xmlui/handle/915/5941
López, A. (25 de Enero de 2016). Modelado de la propagación acústica submarina para comunicaciones Ptp. Obtenido de Repositorio de la Universidad Politécnica de Madrid: https://oa.upm.es/41487/
Ruiz, F. (2013). Eficiencia y Control de Potencia en Canales de Comunicaciones Acústicas Subacuáticas. Obtenido de Repositorio Institucional de la Universidad de Málaga: http://hdl.handle.net/10630/5802
Sharif, J., Neasham, O., Hinton, R., & Adams, A. (2000). A Computationally Efficient Doppler Compensation System for Underwater Acoustic Communications. IEEE J. Ocean.Eng, 25(1).
Socheleau, F. X. (2011). Communications acoustiques sous-marines sur canal fortement dispersif en temps et en fréquence : point de vue de la théorie de l’information. Théorie de l’information [cs.IT]. Brest, fRANCIA: Université de Bretagne occidentale.
Sonj, A., Milica, S., & Mandar, C. (2019). Underwater Acoustic Communications: Where We stand and What is next? IEEE JOURNAL OCEANIC ENGINEERING, VOL44, 1-6.
Stojanovic, M. (2008). Underwater Acoustic Communications: Design Considerations on the Physical Layer. Fifth Annual Conference on Wireless on Demand Network Systems and Services, 1-10.
Stojanovic, M., Catipovic, J., & J., P. (1993). Adaptive multichannel combining and equalization for underwater acoustic communications. Journal of the Acoustical Society of America, 1621-1631.
Toledo, A. (2006). Agua, hombre y paisaje. Ciudad de México, México: Delmo Comunicaciones S.A.
Urick, R. J. (1986). Ambient noise in the sea. Peninsubla Publishing.